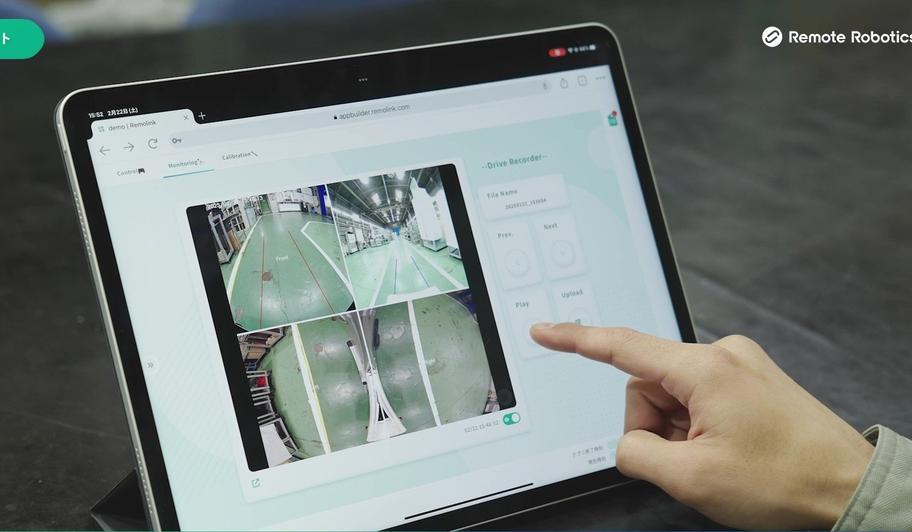
カワサキモータース株式会社はロボットの遠隔操作を可能にする開発用ソフトウェア「Remolink Tools」を活用し、自社開発中のAMR(Autonomous Mobile Robot:自律走行搬送ロボット)の遠隔モニタリング・遠隔操作を実現しています。
部品配膳の自動化のためのAMRですが、接触回避のためや想定外の障害物によって停止することがあります。
開発担当者がAMRが稼働している現場にいなくても、停止をしたことを把握したり、ドライブレコーダーのような形でなぜAMRが停止したかを把握したり、遠隔環境にいても走行再開を指示できる機能を実現しています。
実装した機能
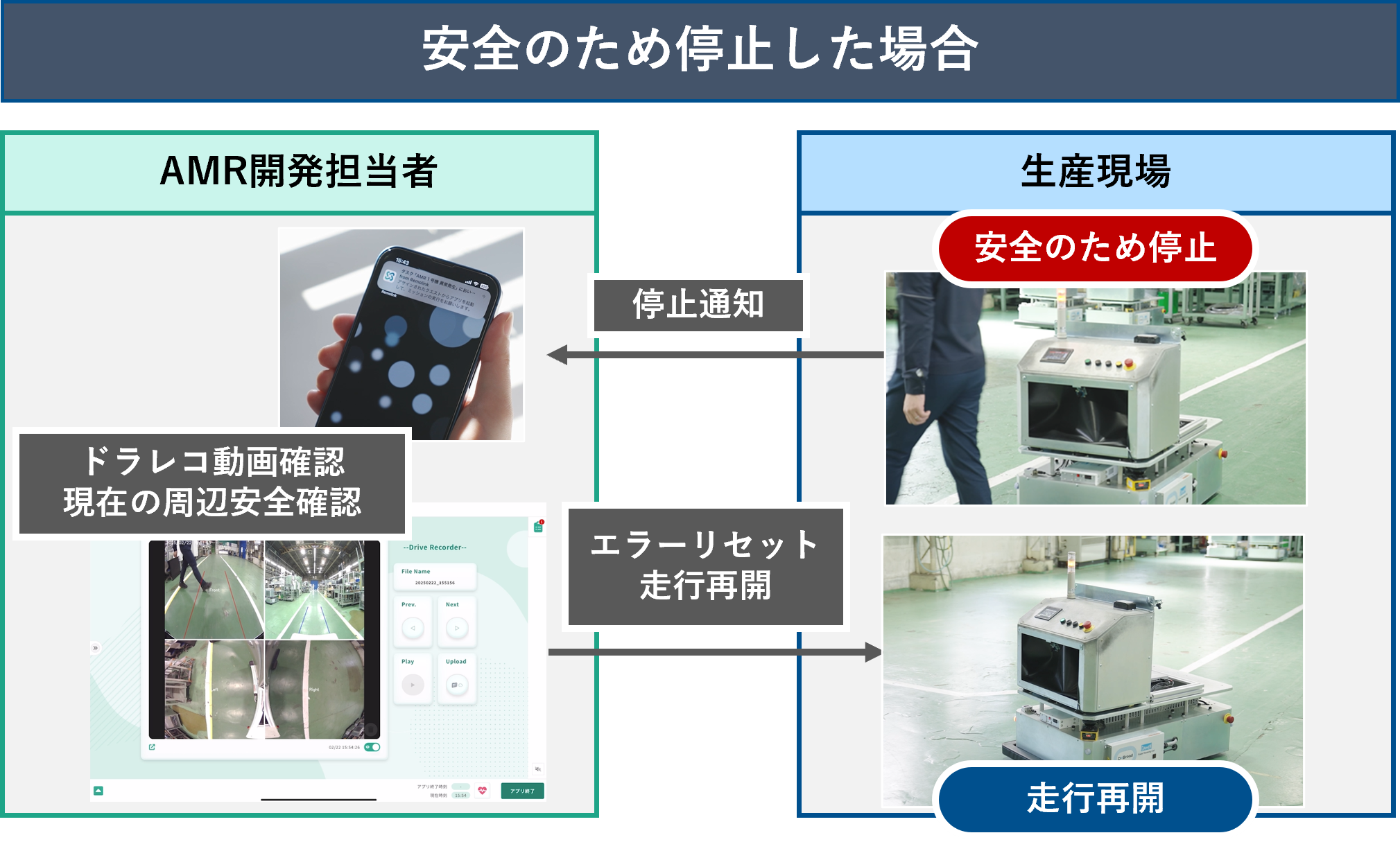
安全のため停止した場合のリモート復旧
AMRには360°人や物の接近を感知するセンサーがついており、人が横切った場合などには安全のため停止します。
開発担当者がAMRが稼働している現場にいなくても、AMRが停止したことを通知で知ることができ、エラー発生前の動画をドライブレコーダーのように見ることでなぜ停止したかを把握できます。
またリアルタイムのカメラ映像によって周囲の安全を確認し、さらには走行再開の指示まで行う機能を実装しています。
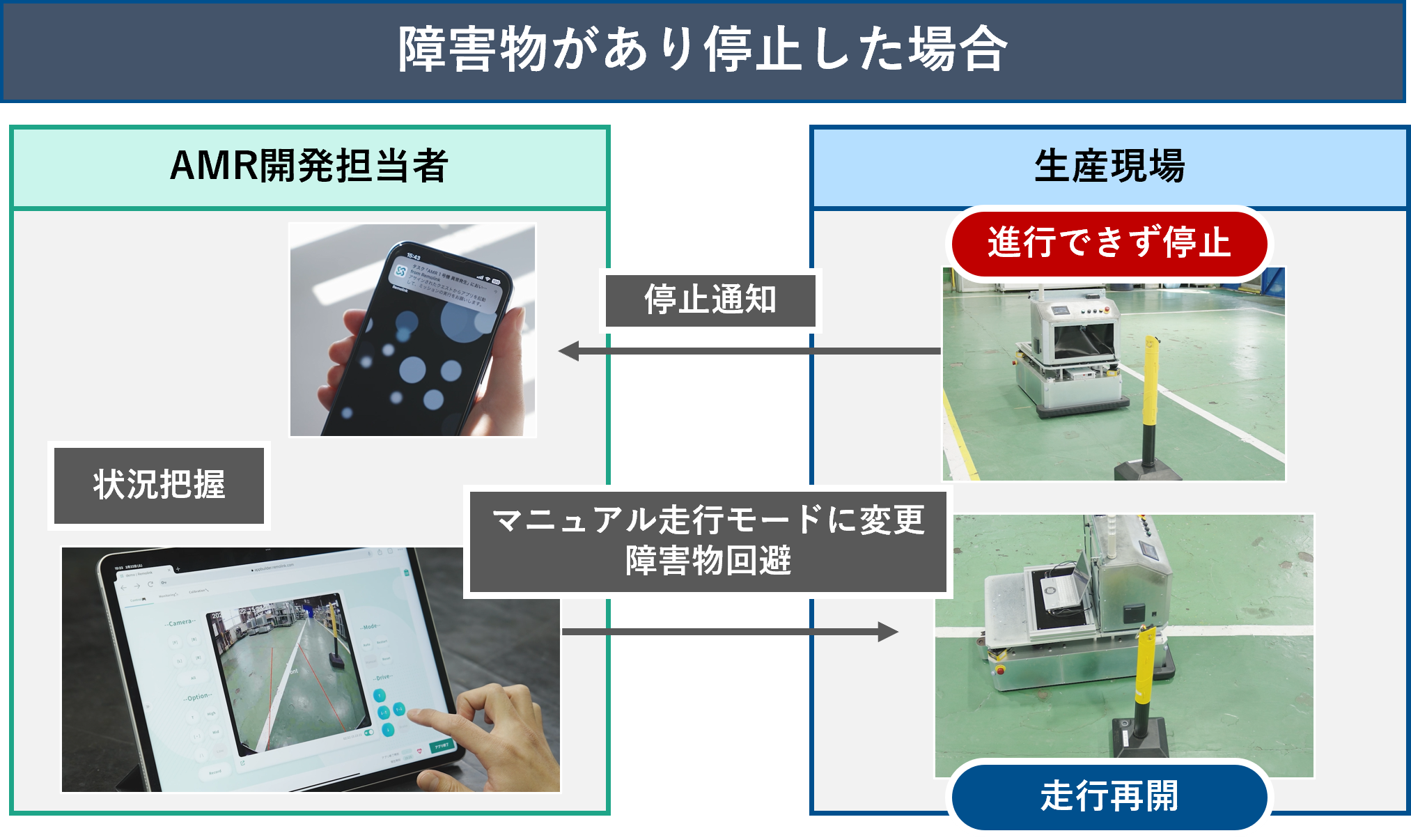
障害物があり停止した場合のリモート走行コントロール
AMRの自動進行ルートに障害物がある場合、走行が継続できずAMRは停止します。
Remolink遠隔操作アプリを使用し、AMRの走行方法を自動からマニュアル操作に切り替え、
障害物を回避させるリモートコントロール機能を実現しています。
カワサキモータース様の事例記事も公開しております。
ぜひご覧ください。