

2023年08月30日
“リモート”による人とロボットの役割分担が課題解決の突破口に!これまでにないアプローチで自動化を促進

ロボットシステムの導入を検討する際、完全自動化に期待する方も多いのではないでしょうか?
しかし、一般的なロボットシステムのアプローチで完全自動化を目指すには、コスト面やリソース面での課題が存在します。
リモートロボティクスが提供する「Remolink」(リモリンク)はロボットによる自律動作に加え、人ならではの認識や判断をリモートで活用するという、これまでにないアプローチのクラウドサービスです。
100%人作業でも100% 自動化でもない、「“リモート”による人とロボットの役割分担」という選択肢で、人手不足の課題を解決しませんか?
今回は、リモートロボティクスのロボット技術パートナーである、ロボットシステムインテグレーター企業の豊電子工業から木倉氏を招いて、ウェビナーを開催。Remolinkが実現する”リモート”の可能性、“リモート”で自動化を推進するという考え方、Remolinkの活用事例についてお話頂きました。
この記事では、2023年7月28日に実施された本ウェビナーに参加頂けなかった方のために、内容を一部編集してご紹介いたします。
ウェビナーアーカイブ動画
株式会社豊電子工業は愛知県刈谷市で1964年に創業したロボットシステムインテグレーター企業です。現在は、産業用ロボットシステムの構想設計から製作・納入・メンテナンスまでを行っており、システムの導入実績は、全世界で2万システム以上。従来の概念にこだわらないフレキシブルな思想で、お客様に最適なロボットシステムを、国内外の有力メーカー製品とシステムインテグレートしてご提案・ご提供しています。
なぜ今、“リモート”に価値があるのか?
木倉:現在、私たち豊電子工業はシステムインテグレータ企業として、当然「完全自動化へ向けたロボットの活用」を進めていますが、もう一つの手法として今回お話しさせていただく「“リモート”による人とロボットの役割分担」というこれまでとは違ったアプローチでの課題解決にも取り組んでいます。
豊電子工業が”リモート”に取り組む理由
木倉:これまで20000件以上の自動化システムを納めてきた私たちがなぜ今、“リモート”に取り組むのか?これには2つの理由があります。
ひとつめは率直に、リモートロボティクス社が掲げる、「すべての人々が社会参加できる“リモート”社会の実現を目指し、新しいワークスタイルを提案する」というパーパスに私たちが共感したため。そして2つめは、社会課題の解決のためです。
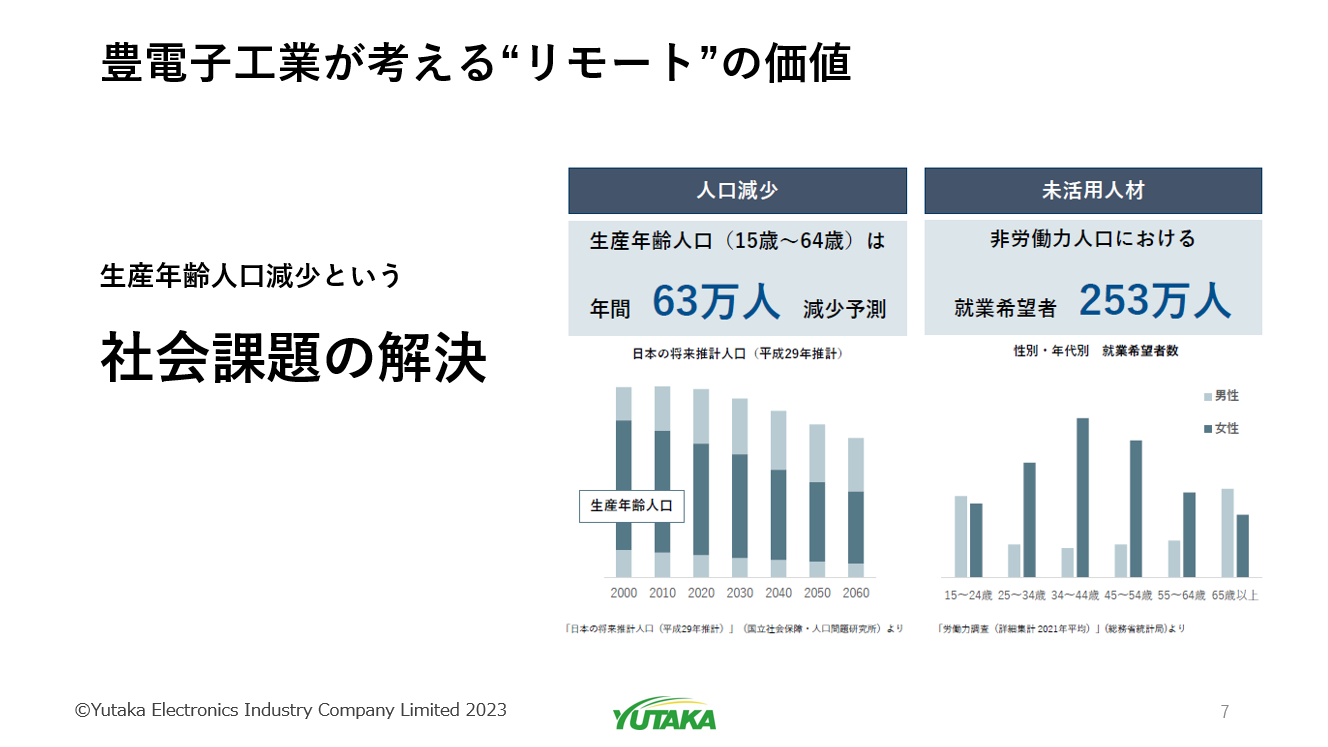
木倉:本グラフでも分かる通り、日本の生産年齢人口は減少の一途をたどっており、どの業界でも人出不足が叫ばれています。そのため、ロボットシステムを導入される企業様は通常、「作業者をどれくらい減らせるのか?」という部分が目的になりがちです。
実際に、私どものお客様からも「作業者が集まらない」というお悩みは非常によく聞きます。こうした問題は、採用コストの増加にもつながり、事業に深刻な影響を与えているのが現状です。
しかし、本日ご紹介するRemolinkの導入が広がることで、年齢や環境、身体的な問題など、さまざまな事情を抱える方が積極的に社会参加できる可能性が生まれます。これは、日本の生産年齢人口の減少という社会課題の解決につながる、意義のあるプロダクトだと考えております。
これまでにない座組で社会課題解決へアプローチ
木倉:ではなぜ”リモート”で社会課題が解決できるのか。
それはこれまでにない新たな座組をリモートロボティクス社が提供しているからです。
真ん中頂点に記載されているタスクマネージャー:エンドユーザーであるお客様
右下のデベロッパー:我々のようなロボットシステムインタグレーター
左下のワーカー・ワーカーマネージャー:人材派遣会社さんやその登録している労働者の方
という座組によって
①人財確保の仕組み
②ロボットでの自動化の促進
をセットで提供できるようになっています。
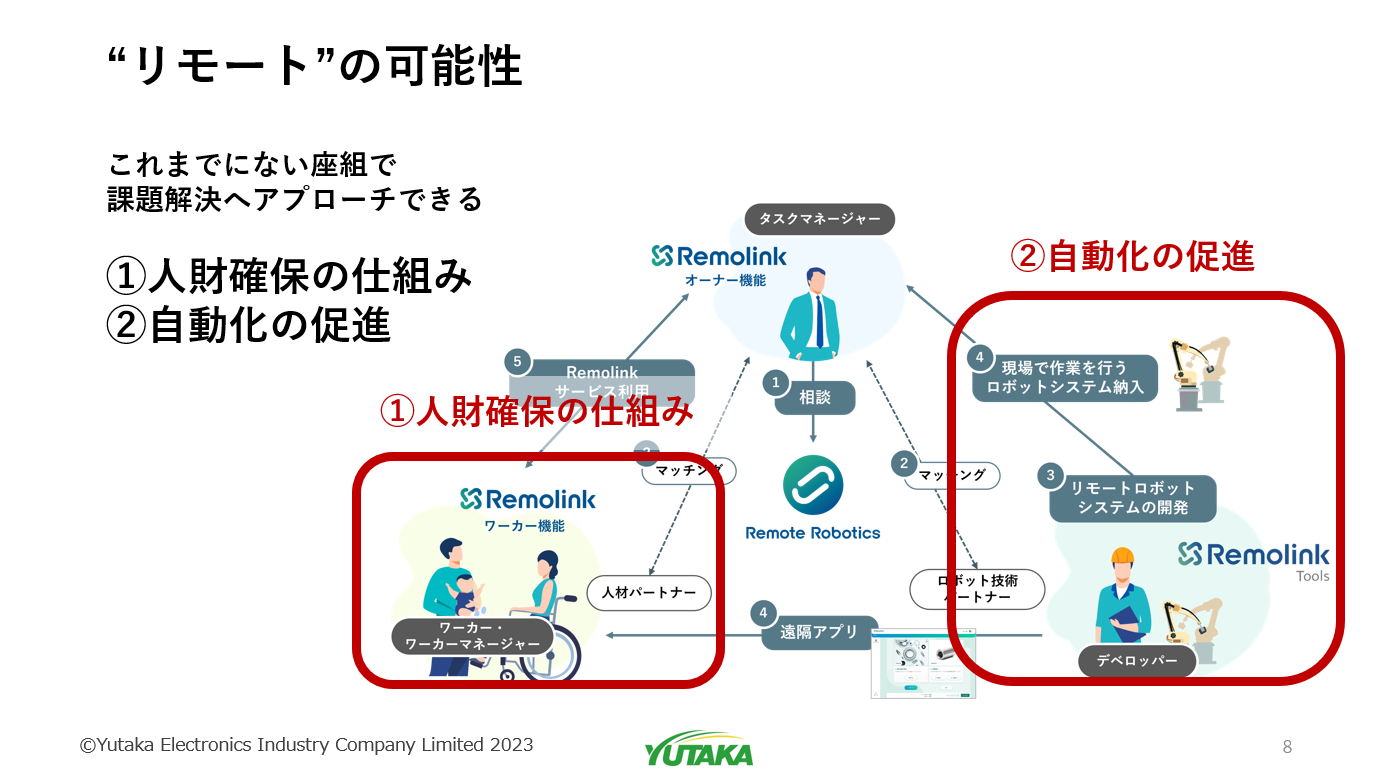
これまでは自動化という手法一辺倒であったところに人財確保のしくみをプラスすることでより強力に課題解決につなげられると考えています。
ここでの人財確保に関して、リモートを活用することで、地域に縛られないということも、課題解決の解消要素と考えています。
”リモート”が従来の課題を解決し自動化促進の鍵に
木倉:ここからは「”リモート”による人とロボットの役割分担という選択肢」がどのように自動化の促進に寄与していくのかをデモ動画を交えて深堀りしていきましょう。
完全自動化の壁「認識」
木倉:そもそも、“リモート”が「自動化を促進する」とは、どういうことなのか?それを考えるには、従来のロボットシステムの課題を知っておく必要があります。そこでキーワードとなるのが「認識」。ロボットでの完全自動化を叶えるには、ワークの認識精度を上げる必要があります。
以下は、一般的に認識が難しいと言われるケースの例です。
・ワークの光沢
・膨大な品種数
・可変する環境
・微小または不定形な傷など
現在の技術で上記のようなケースの認識が不可能かというと、決してそうではありません。にも関わらず、現状では具体的な現場実装は進んでいません。その要因には、以下の2点があげられるでしょう。
認識精度を阻害する2つの要因
①コスト
②認識の規模感
ひとつめはコストの問題です。カメラと認識ソフトをアップグレードすれば1000万前後のコストがかかることも珍しくありません。それも万能ではなく、さらに認識できないケースに遭遇した場合は、都度学習する必要があります。学習作業自体もエンドユーザーでは行えず、メーカーに依頼するためコストは膨らむ一方です。
ふたつめは、認識の規模感の問題。当然ながら、優秀な認識モデルには、膨大な量の学習データが必要であり、それをどう集めるかというのも課題のひとつです。たとえば、サンプルワーク10個の学習データを持つロボットが、実際の生産で1日1万個を認識することになった時、現状の学習データだけでは判別できないものが出てきます。仮に追加で1万パターンの学習が必要であった場合、トライから現場実装までの変数が爆発的に増えるため、認識が対応しきれなかったり、対応できても労力が大きすぎて諦めてしまうことが考えられるのです。
上記2点の理由から、自動化の有用性が落ち、費用対効果が見込めなくなるため、完全自動化に向けた現場実装は進んでいないと理解しています。
求められる「柔軟性」は”リモート”で人が担う
木倉:これまであげたことを踏まえ、そもそも「なぜ現状のシステムでの認識が難しいのか」に立ち帰ってみると、その本質は「複数の要素それぞれの変化に対応しなければならないため」であることがわかります。さらに、変化の数と振り幅によっても、認識の難易度が変わるため、さまざまな要因の変化に対応できる柔軟性が求められるのです。
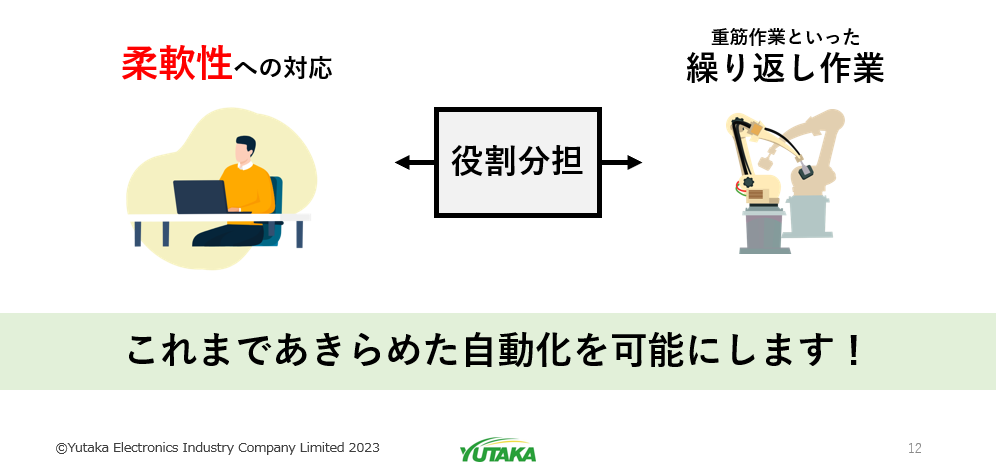
では、どうやって認識の課題を解決するのか?その答えが“リモート”です。Remolinkを通じて、人が“リモート”でワークを認識し、ロボットが重労働や繰り返し作業を行うことで、人とロボットがお互いに得意な仕事を補完し合い、新たな可価値が創出できると考えています。
自動化=人ゼロ というバイアスへの挑戦
木倉:たとえば、人の労働力を10とした場合、コストや規模感の問題で完全自動化を諦めると、労働力は10必要なままですよね。ですが、“リモート”の活用によって人の労働力が2にできた場合、残り8の労働が自動化できます。
この8の部分が、はじめに「なぜ“リモート”に取り組むのか?」というところでお伝えした、生産年齢人口の減少という社会課題の解決に寄与します。
完全自動化をして人を0にする必要はないのです。

木倉:「ロボットで自動化」というと、目指すべきゴールは完全自動化であり、人を何人削減できるのか、が議論ポイントになりがちです。私たちは、こうしたバイアスを取り払い、「100%人作業でも、100%自動化でもない、“リモート”による人とロボットの役割分担」という新たな選択肢が日本の未来に大きく貢献すると信じています。
物流領域におけるRemolink活用例
木倉:ここからは具体的なデモで物流領域でのユースケースについてご説明します。
まずはデモ動画をご覧ください。
木倉:デパレタイズにおいて、対象ワークや周辺環境によって起こる認識の難易度の変化は自動化の壁のひとつです。
自動での認識が難しい例を3つ挙げて紹介します。
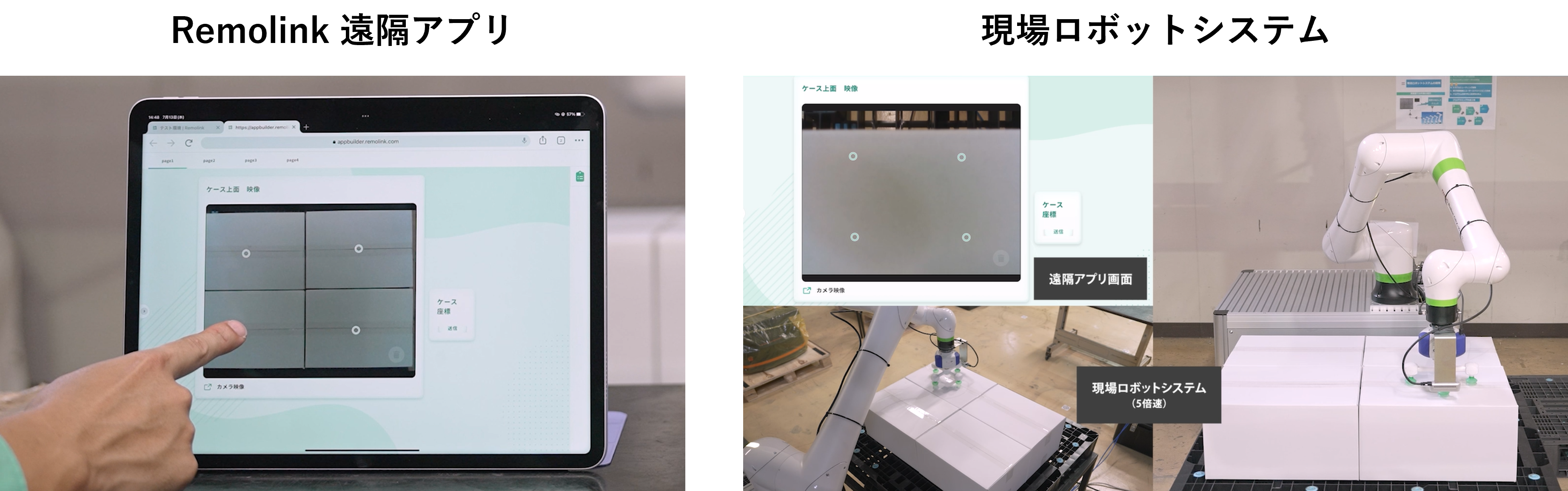
Case1:白い箱+透明テープ
木倉:一般的な画像認識では、白色、黒色、光沢の認識が難しいとされています。今回は白色のダンボールケースに透明テープを貼っており、難しいとされるパターンを再現しました。同じ高さで、かつ密着している積み付け荷姿の場合、各箱の輪郭の認識は難しく、箱の中央のフラップの閉じ目によって、1つの箱を2つと誤って認識してしまうことがあります。
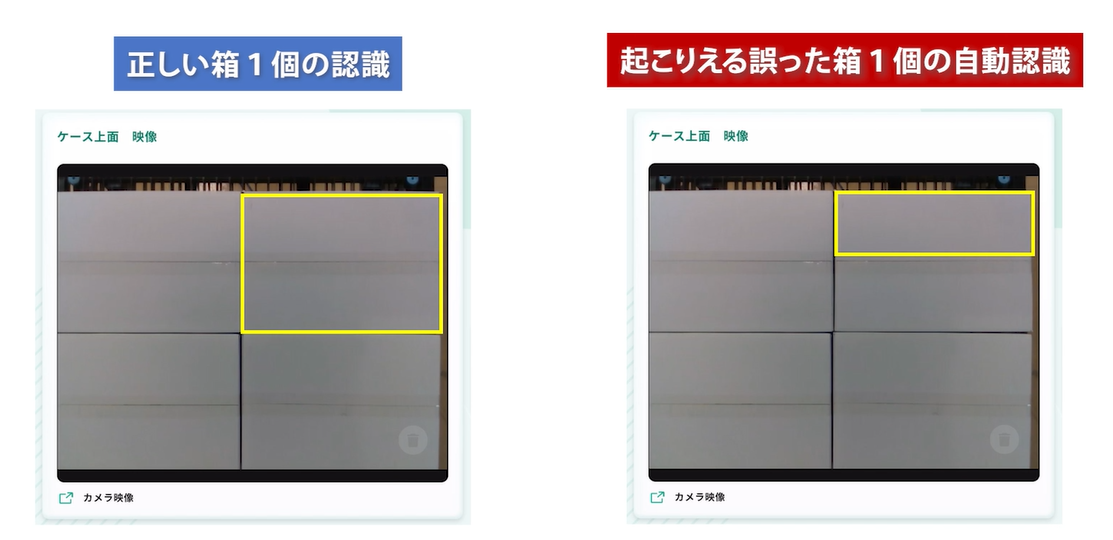
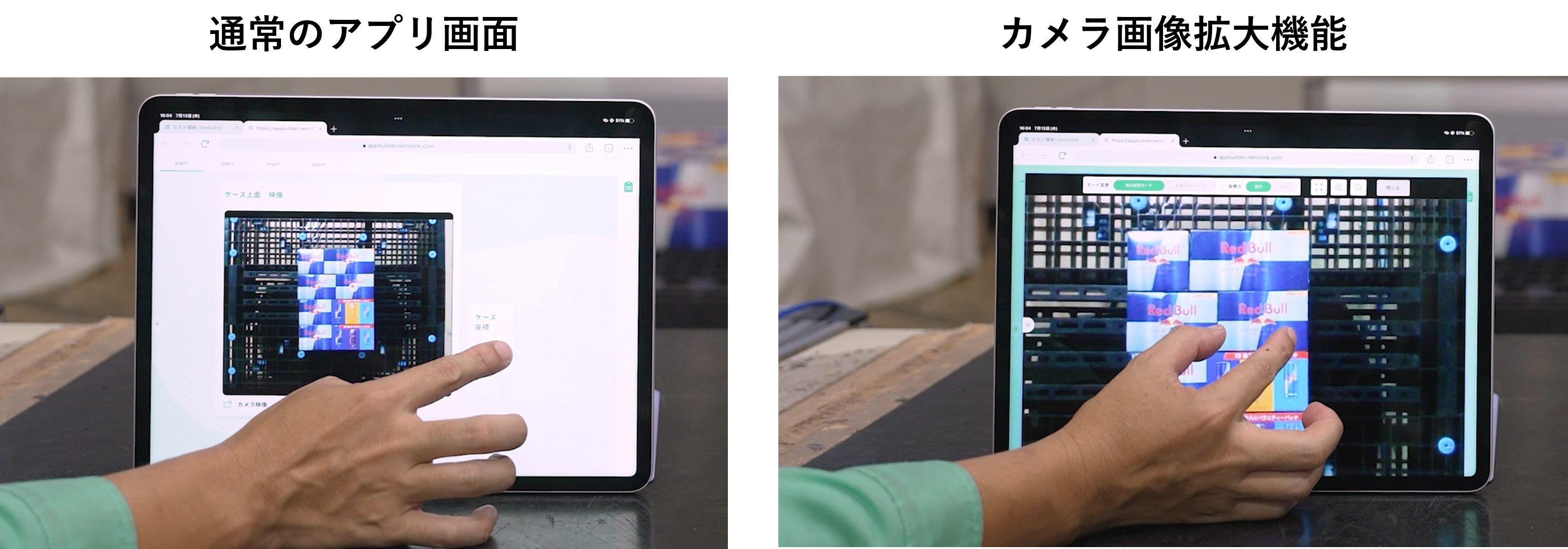
こんな時、Remolinkであれば、人が“リモート”環境から1箱を認識・判断し、ロボットが把持するべき位置を指示できます。左の画像のようにRemolink遠隔アプリのカメラ画像上でポイントをした位置に、ポイントをした順番で、ロボットが箱を取りに行くため、光学的な問題による認識の課題や、ケースの輪郭の認識の課題は一掃され、正確な作業が可能です。
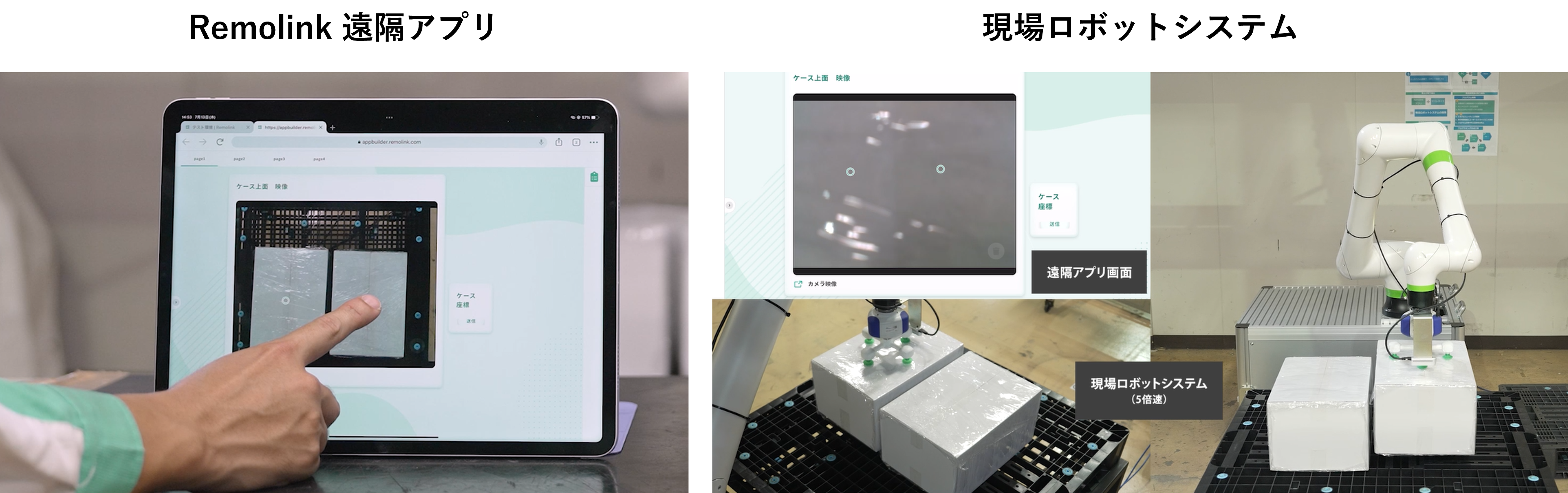
Case2:反射する梱包
木倉:次に、白色のダンボールケースにフィルムを巻いた事例です。この場合はフィルムでぐるぐる巻きにされているため、画像認識だと光の反射のノイズが原因で誤認識してしまうという課題があります。また、光の強弱や光の当たり方によってさまざまな見え方になってしまう難しさもあります。
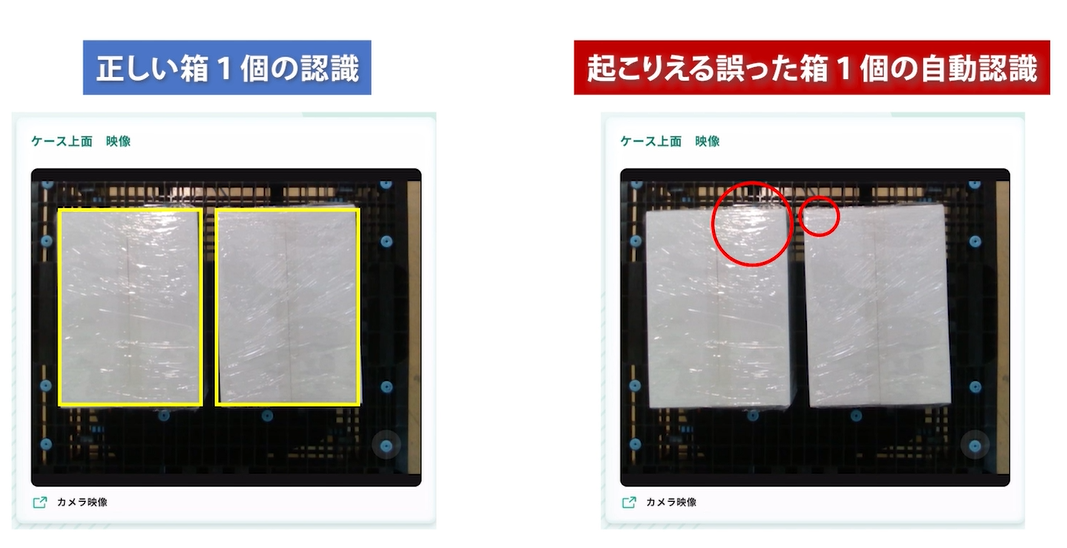
この場合も、Remolinkで人が認識を行えば、ロボットは光の当たり方に左右されず正確に作業できます。さらに、フィルムの上から伝票やバンド、「割れ物注意」などの配送シールが貼られている場合も、問題なく識別できます。
仮にロボット自身に認識させるには、伝票・バンド・シールなどがさまざまな場所に貼られているパターンや、貼られていないパターンなど、膨大な学習データが必要です。不可能ではありませんが、現場実装の実現性が低く、現実的ではないのがおわかりいただけると思います。
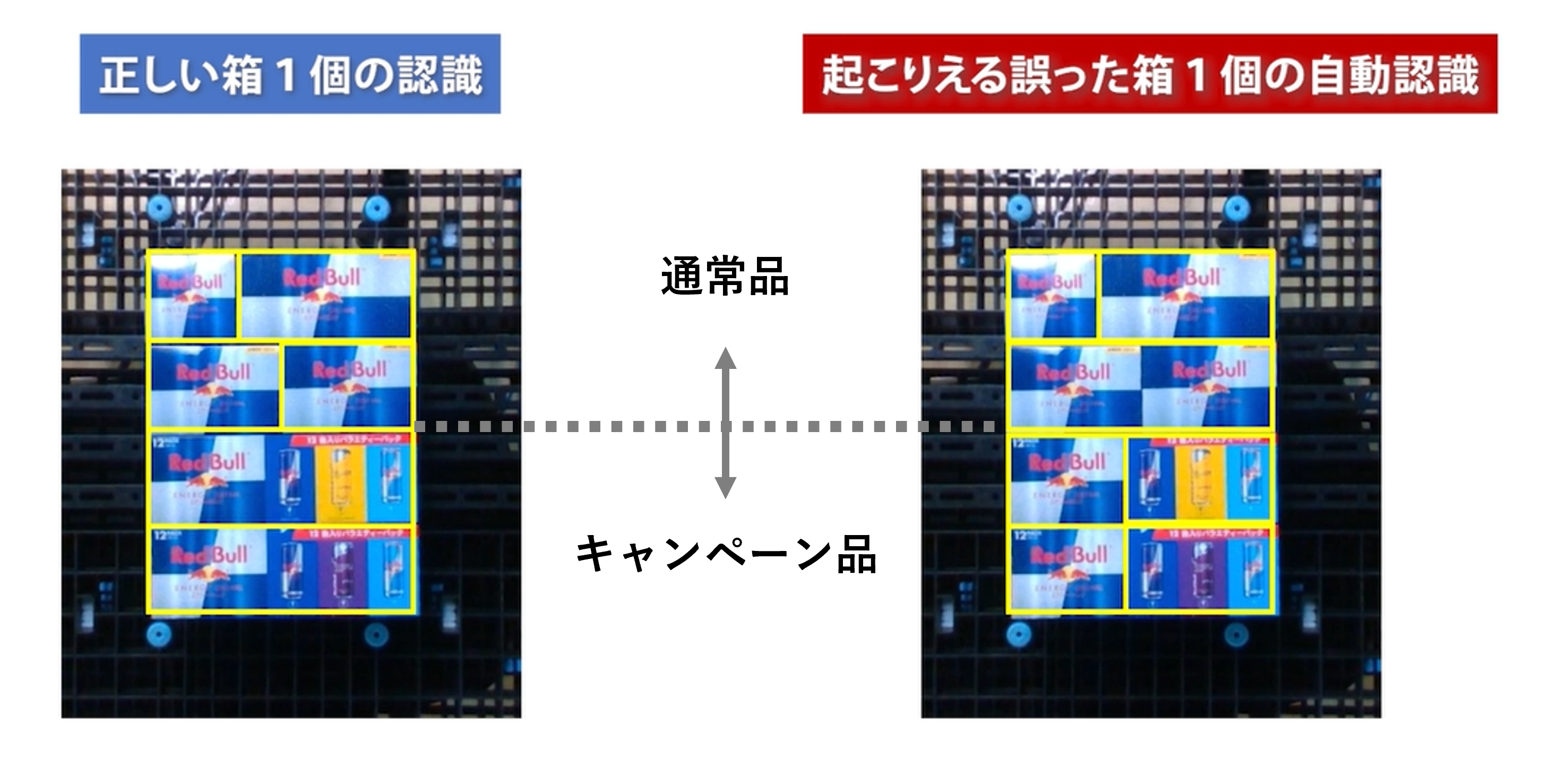
Case3:模様のある箱・キャンペーン品
木倉:これは同一の柄が密着して、同一の高さで積まれたパターンで、ケースの輪郭認識が難しい事例です。このケースではさらに、通常品とキャンペーン品という異なる柄も混ぜています。
これまで学習していないキャンペーン品が突如登場すると認識ができなくなります。このようなパッケージの変更は流通業界では頻繁におきるため現場実装をより困難にしています。
木倉:柄が複雑で、ケースの輪郭が見えにくい場合、人でも箱1つの認識は難しいように思えますが、遠隔アプリに拡大機能が付いているため、問題なく認識できます。
柄ケースが密着している、かつキャンペーン品が突然あらわれるパターンでも人による「柔軟性」がそれを解決し現場実装を可能にします。
木倉:現在の機械学習の認識技術であればこれも認識自体は可能ですが、変化があった場合に対応できなくなる可能性は十分にあります。そして高額品となる可能性もあります。
ロボットやビジョン認識を使ってのインテグレーションの仕事をしていると、人間の対応力、柔軟性の高さを実感します。
“リモート”を活用することで、ロボットの良さ、人の良さ、それぞれのいいとこどりが可能になります。
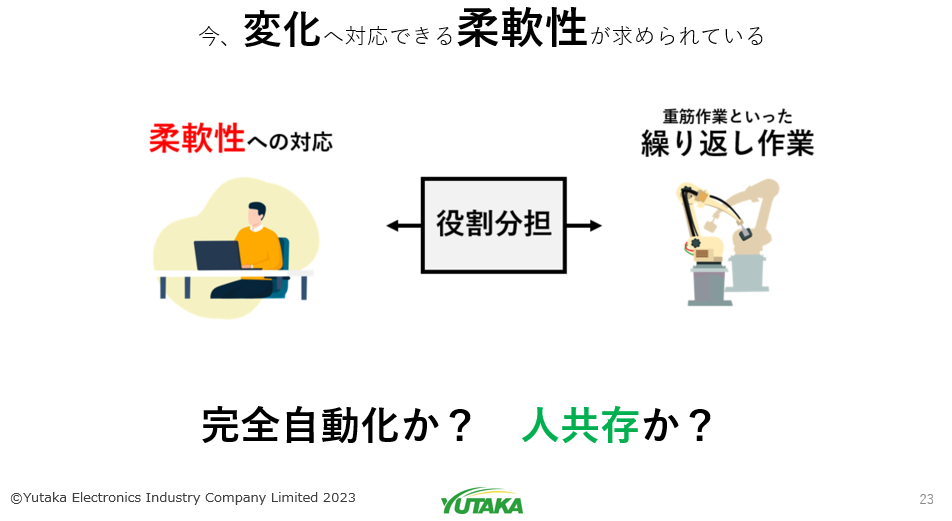
今、変化へ対応できる柔軟性が求められている
木倉:リモートによる人とロボットによる役割分担というテーマでここまでお話させて頂きました。
少量多品種、季節の変化によるパッケージの変更、新しいトレンドに対応した新商品、常に変化にさらされているなかで、変化に対応出来る柔軟性が必要だと考えます。
難易度が高い、高額でハイスペックな画像処理に手が出ないというお悩みもあると思います。難しさの正体は「変化」です。
完全自動化することも方法の一つですし、人と共存する方法も一つです。この選択そのものも、役割分担と言えるかも知れません。我々は、新しいアプローチとして、人共存にチャレンジし、社会課題の解決に貢献していきます。
これらの内容に共感して頂ける企業様、興味ある、PoCやってみたい、という企業様がおられましたらご連絡を頂けますと幸いです。