

2023年03月15日
ソニーR&Dロボティクス開発リーダーが語る「一足飛びには行けない」完全自動化に向けた段階的進化の重要性

ロボットによる完全自動化(Full Autonomy)は、製造業をはじめ多くの産業で取り組みが始まっていますが、ロボット導入のゴールを最初から「完全自動化」に据えてしまうと、現実とのギャップが浮き彫りとなります。ソニーグループR&Dセンターでロボティクス・AI領域の研究開発の指揮をとる芦ヶ原隆之氏にお話を伺いました。

芦ヶ原 隆之|よしがはら たかゆき
ソニーグループR&Dセンター基盤技術研究開発フィールド上級主幹技師
人が目で視るように、コンピューターがカメラを利用して実世界を理解できるようにする「コンピュータービジョン(CV)」とその関連技術を専門とする。ソニーでは、ヒト型ロボット「SDR」「QRIO」や、エンタテインメントロボット「aibo」をはじめ、ゲーム、AR、医用画像、車載、スマートフォン、デジタルカメラ等、広範囲にわるCV応用を手掛ける。現在はR&DセンターでロボティクスやAI領域の研究開発の指揮を執り、ソニーの技術開発と人材育成をリードするCorporate Distinguished Engineerも務めている。
2023年3月時点の情報をもとに作成。
ソニーグループが今目指すのは「人に役立つロボット」
– インタビュアー
R&Dセンターにおいてはどのようなロボットの開発を目指しているのでしょうか。
– 芦ヶ原
研究開発を取り巻く環境はその時々で変化しましたが、ソニーグループのロボティクス開発のビジョンとして「人に近付くロボット」という軸はずっと変わっていません。「生活環境で人と共存できるロボット」の先にある「人に役立つロボット」が我々の目指すところです。
「aibo」や「QRIO」はエンタテインメント領域で人に近づくためのロボットなので、タスクをこなしたり、人と共同作業するための機能に関して、あえて開発のスコープにしていないところがあります。たとえば、細かなボタンを押したり、重いものを持ったりする機能です。
ロボットを社会課題の解決に生かすことを目指し、現在取り組んでいる複数のプロジェクトに取り組んでいます。具体的には、建設、介護、医療などさまざまな現場で障壁になっている技術的な課題を取り除くためのものです。様々な社会的ニーズがあり、いずれも難易度が高いですが、真に解決すべき重要なイシューと捉えています。
– インタビュアー
R&Dセンターで取り組まれている具体的な技術に落とし込むと、どういったものが挙げられますか。
– 芦ヶ原
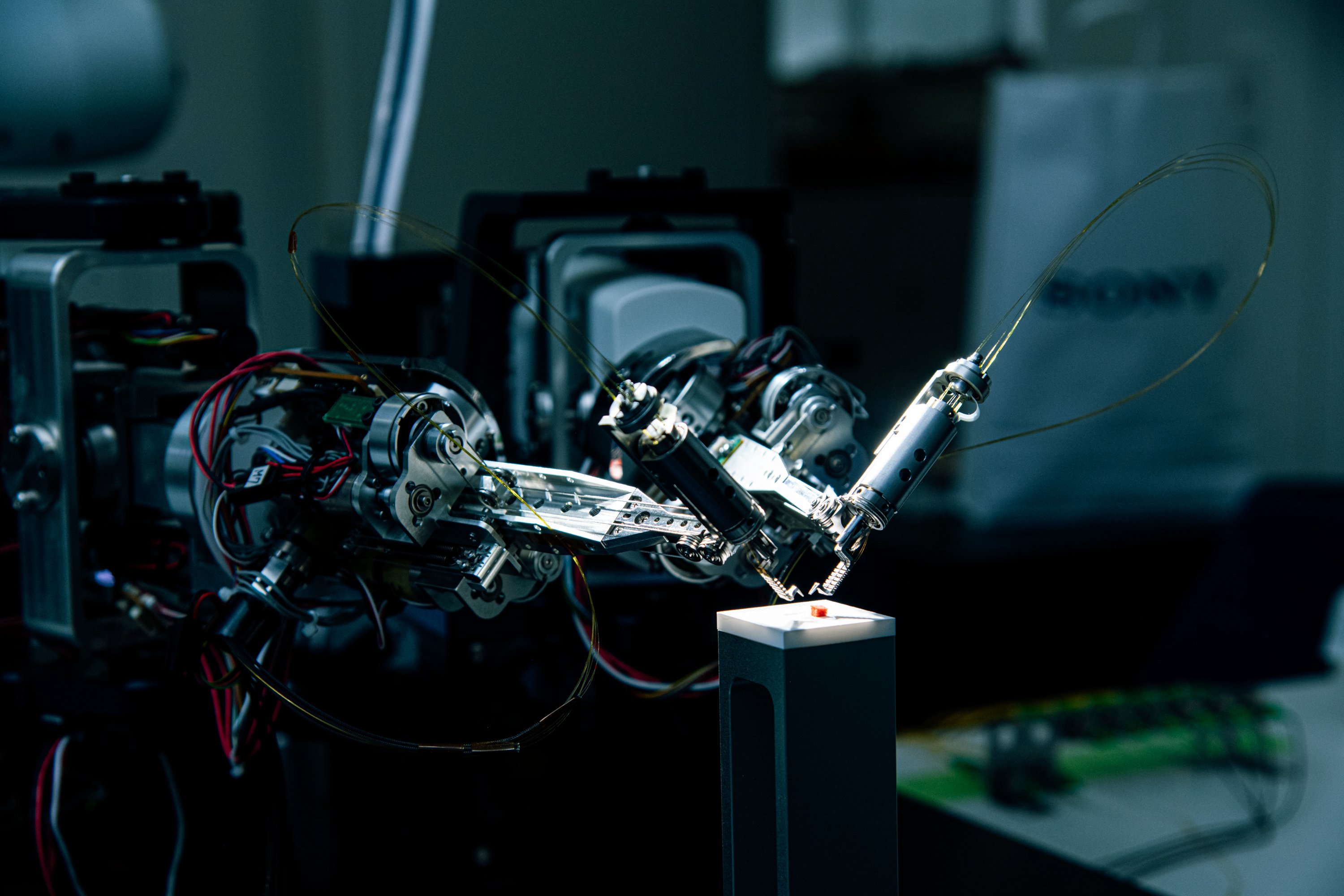
ロボットの器用さ(dexterity)や運動性能における実課題を、開発ターゲットに設定しています。繊細な人の手を再現する「マニピュレーター」をはじめ、遠隔からロボットを操作し人の手ではできないような細かな作業を可能にする「精密バイラテラル制御システム」、平地・不整地を問わず安全かつ効率的な移動を可能にする「新移動機構」などが挙げられます。

繊細な人の手を再現する「マニピュレーター」
「ソニーグループポータル」(ソニーグループ株式会社)
(https://www.sony.com/ja/SonyInfo/research/technologies/mobile-manipulator/)より引用
10分の1のスケールの世界に触れることを可能にする「精密バイラテラル制御システム」
「ソニーグループポータル」(ソニーグループ株式会社)
(https://www.sony.com/ja/SonyInfo/research/technologies/bilateral_control_system/)より引用
– インタビュアー
ロボット開発は広範な技術やノウハウが要求されます。オールラウンドな開発力を有するソニーグループの視点で、「人に役立つロボット」を目指す上での技術課題はどう捉えていますか。
– 芦ヶ原
前述のとおり、器用さ(dexterity)や運動性能、そして安全性です。我々のアプローチとしては、力覚や触感、ビジョンセンサーの情報を取り込み、AIを駆使しロボットの最適な動作を生成していくことが鍵になると考えています。
器用さの実現は、特に重要な課題です。ゆっくりした動きなら器用にできるかもしれませんが、それでは実課題を解決できません。そのため速さと器用さを両立させることが求められます。制御やセンシング、通信、コミュニケーションなど、ロボットを構成するさまざまな技術の開発要素にブレークダウンし、統合的に取り組んでいます。

ロボットの“眼”を実現する—人と共存するロボットに必要なもの
– インタビュアー
安全性について掘り下げてお聞きできますか。
– 芦ヶ原
現状でも、人が入ってこない環境であれば、速く器用に動く産業用ロボットを実現できているものもありますが、人を傷つけるようなことがあっては人との共存が成り立ちません。そういった問題がない技術を届けるために、安全性の担保は重要です。
我々は、何かにぶつかった時にしなやかに力を逃がす技術の開発に、かねてより取り組んできました。前述の開発中のロボットにも、そうした技術を取り入れています。さらに、人間の場合は、ぶつかってしまう前に回避する行動をとりますよね。従って、人と同じ空間で動作するロボットにもまた、センサーで周辺環境を検知し、ぶつかる前に予測して回避する技術が必要になると考えています。そのためには、超音波のような非接触技術も活用できる可能性があり、それらの要素技術が確立されることで、ロボットの“眼”の実現も見えてくるのではないかと考えています。
“眼”を生かすAI—ロボティクス領域で求められるAI
– インタビュアー
「ロボットの“眼”」というのは比喩的ですが芯を食った表現ですね。どんな環境でも安定して動作するために、リアルタイムな環境センシングは車の自動運転などでも脚光を浴びているホットな領域です。そうしたセンシング情報を処理するAI領域も近年、画像生成AIのStable diffusionや、大規模言語モデル(LLM)を駆使したChatGPTなどブレークスルーが頻出しています。ロボティクスとAIという視点でこうした動きはどう見ておられますか。
– 芦ヶ原
ジェネレーティブAI(生成AI)ですね。情報のインプットを受けて何かを生成することができる技術ですが、ロボティクスの世界でも、センサーの情報を入力とし、動き(モーション)を生成する過程に生成系AIが活用できると考えています。
例えば、aiboでも「お手」の声かけにあわせて「お手」をしますが、これは特定の言葉と特定の動作をリンクさせることで、決められた動きをアウトプットしています。これに対し、現在取り組んでいる生成AIはさらにダイナミックに周辺の環境を認識し、最適な動作を結びつけることを指しています。生成の過程では、言葉などのテキストという人間が理解できるパラメータを介して全てがつながっていくことになるので、大規模言語モデルを用いたAIの動向も注視しています。
言語モデル以外に目を向けると、「Gato」のようにロボットアームの制御も含むさまざまなタスクに対応できる汎用的なファウンデーションモデルも出てきました。AIで必要となるモデルは膨大なデータ量で、学習と展開を自前で行うのは大変ですが、そこからダウンストリームタスクとして応用していく上では、さまざまなテクニックや工夫が介在する余地があります。こうした技術にも広く目を向けながら、特にAIでクリエイターやユーザーをサポートする技術を作っていきたいと思っています。
「一足飛びに完全自動化には行けない」ロボットの段階的進化、現在地は?
– インタビュアー
Full Autonomyに向けた要素技術の開発・進化についてお聞きしてきましたが、ロボットによる完全自動化実現の展望はどう見ておられますか。
– 芦ヶ原
コントロールを含め必要なリソースを外から供給し、作業エリアだけ自動化ということなら、半導体の生産現場などで実施できている部分はあります。ただ、完全自動化を実現しようとすると、取り組まなければならない課題がまだまだたくさんあります。
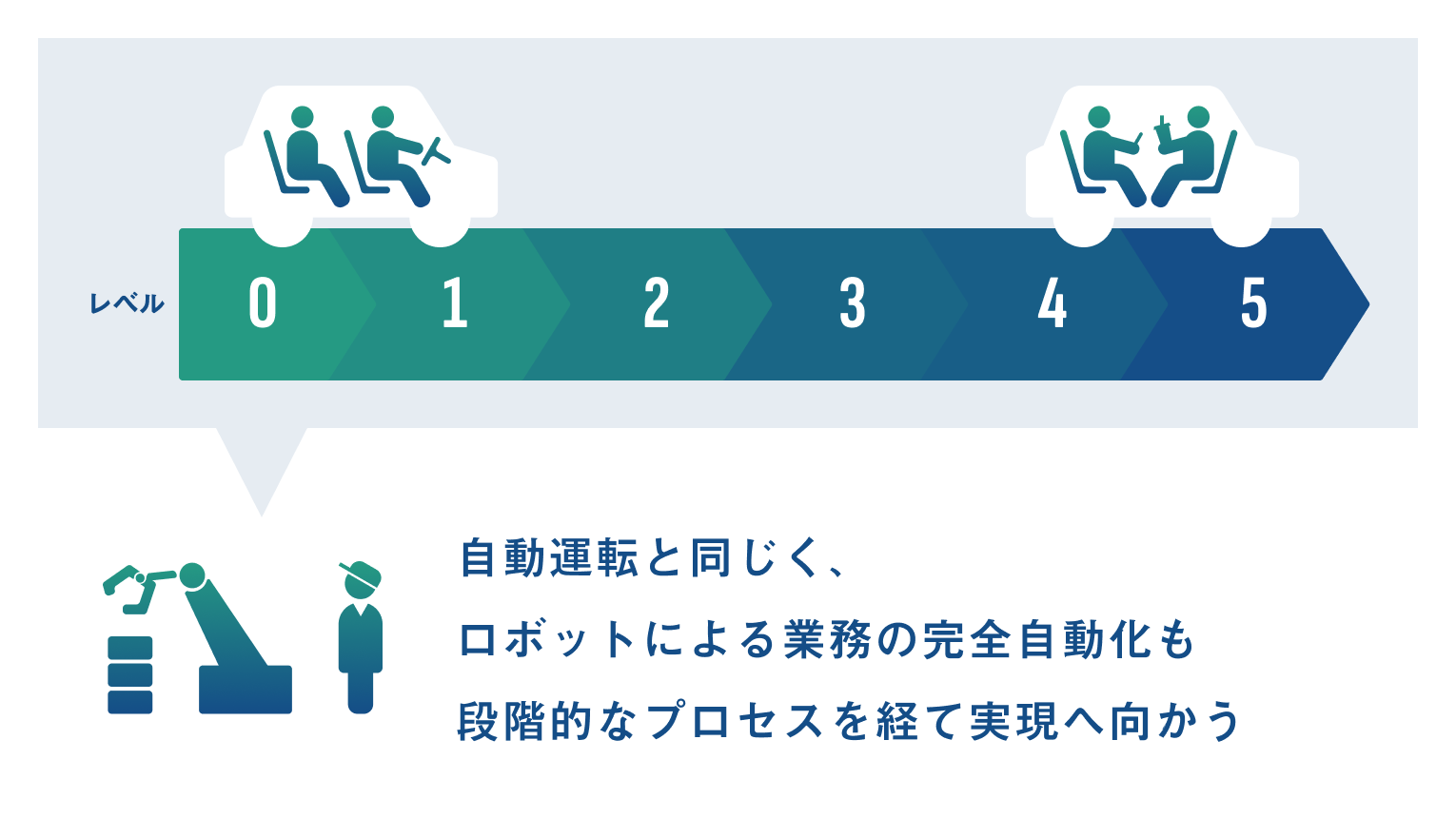
車の自動運転をイメージしてみてください。完全自動運転(レベル5)までには、車が人の運転を支援するレベル2、人が緊急時に車を支援するレベル3といったように段階的なプロセスがあります。ロボットやAIによる作業の完全自動化も同様で、人がロボットの動作を支援する機能を段階的に充実させて、ようやく完全自動化が実現できるものと考えています。
ロボットによる完全自動化の展望としては、2050年くらいには一定のレベルで達成できるのではないかと個人的には考えています。ただ、社会的受容性や倫理的な問題などは必ず残ります。
こうした課題をクリアしていくためにも、リモートロボティクスでの取り組みにも非常に期待しています。リモートロボットのためのシステム開発や、運用の中で得られるデータや知見は、将来的な完全自動化のアドバンテージにつながっていくでしょう。
– インタビュアー
先端技術を取り入れていくときに、事業者はどんなことを考慮すべきでしょうか。
– 芦ヶ原
コストや人手不足といったさまざまな制約がある中、ロボット導入による完全自動化を試みて諦めてしまった事業者もおられるかもしれません。ですが、ロボットが役立つ場面が必ずあると思います。ぜひロボットを課題解決のための選択肢の一つとしていただきたいと思っています。
自動運転にも通じる話ですが、技術は世に出て終わりではなく、それをきっかけにして関連技術の開発や社会の受け入れ態勢も変わってくると思います。完全自動化の実現に向けても、現場にロボットが導入されることがファーストステップになるのではないでしょうか。
例えば、リモートの視点をとり入れるだけでも、できるようになることがたくさんあると思います。現場では、人が判断してもらわざるを得ない場面がなかなかなくならないのが現状です。そんなとき、人がリモートで指示するだけでロボットができることが増えるわけです。それこそがリモートロボティクスが提供している価値ではないでしょうか。

– インタビュアー
ロボットを導入することで課題に対する最適な解を見つけるためのデータも取れるようになるということですね。データが蓄積され、ナレッジが上がっていくことで、完全自動化の道も開ける。まず入れないと何も始まらないと。
– 芦ヶ原
そうですね。お客様のニーズによっては、冒頭でも説明したような弊社で開発している要素技術も提供していけると思います。
ロボットを遠隔で制御するにあたっては、周辺環境も含め、エッジ側のロボットの状況をリモートワーカーがどのように把握できるかがポイントになるでしょう。
また、熟練したワーカーは、視覚に限らず、さまざまな感覚を駆使して違和感や発見につながる情報を察知しますよね。そうした複数の情報をセンシングして、人に伝えるにあたっては、3次元環境センシング技術も活用できるかもしれません。
我々としても、現場で求められる役割の明確化や技術的な課題の洗い出しが必要ですので、リモートロボティクスとともに事業者と向き合いながら、ロボットの研究開発を続けていきたいと思っています。

すべての機器が実世界を理解できるようにする「3次元環境センシング」
「ソニーグループポータル」(ソニーグループ株式会社)
(https://www.sony.com/ja/SonyInfo/research/technologies/3D_environment_sensing/)より引用